

如何对每根机器人轴执行粗略校准,即使用操纵台更新每根轴的转数 计数器值。
步骤 1 - 手动使机器人运行至校准位置 此步骤详细介绍更新转数计数器的第一步:手动使机器人运行至校准位置。
操作
1. 选择“逐轴”动作模式。
2. 微动机器人,使校准标记位于公差范围 内。 IRB 140, 1400, 2400, 4400, 6600ID/ 6650ID: 轴 5 和 6 必须一起定位!
3. 定位好所有的轴以后,储存转数计数器 设置。
步骤 2 - 使用 FlexPendant 储存转数计数器设置 本节详细介绍更新转数计数器的第二步 ? 使用 FlexPendant (RobotWare 5.0) 储 存转数计数器设置。
操作
1. 在 ABB 菜单上,点击校准。 与系统相连的所有机械单元将连同校准状态一起显示。
2. 点击所述的机械单元。 将显示如下屏幕:点击转数计数器。
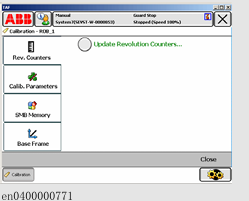
3. 点击更新转数计数器...。 系统将显示一个对话框,警告更新转数计数器可能会改变预设机器人位置: 点击是更新转数计数器。 点击否取消更新转数计数器。 点击是显示轴选择窗口。
4. 选择需要更新转数计数器的轴: 勾选左边的复选框 点击全选更新所有的轴。 然后点击更新。
5. 系统将显示一个对话框,警告更新操作不能撤消: 点击更新以继续更新转数计数器。 点击取消以取消更新转数计数器。 点击更新将更新勾选的转数计数器,并除去轴列表中的勾号。
6. 如果转数计数器未正确更新,将导致机器人定位不正确,从而导致损坏或损伤! 因此每次更新后应仔细检查校准位置。
更多资讯:ABB机器人
