

ABB机器人"RAM 内存"指主机主要内存,即,主机处理器在正常操作过程中所使用的内存模 块。这是控制器的主要海量存储单位,即控制器海量存储器 取决于控制器版本,存储单 元可能是硬盘或闪盘或其它盘,而且大小也不同。 它也包含操作机器人的所有必要 软件,同时 RobotWare 也安装于此。 启动时,数据从海量存储器加载入 RAM 内存中。 电源关闭时, image.bin 保存于此。
RAM 内存图示
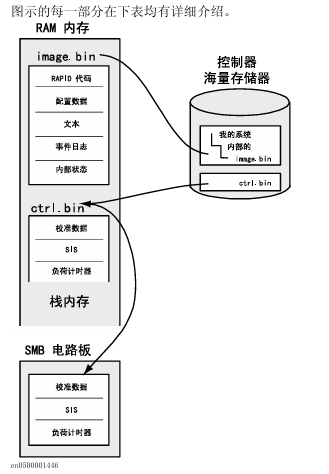
RAM 内存:主机内存模块位于计算机母板上。处理器在程序执行过程中读写该内存。 RAM 内存大小可能不同,但内存大小的变化 不会改进 。
image.bin:如果系统被人为关闭,或因停电而关闭,image.bin 文件将保存到控制器硬 盘或闪盘中。 它是系统在操作过程中创建的内部文件,用户通常无法看到 它。 当执行系统“热启动”时,完整的 image.bin 文件将重新加载入 RAM 内存 中。其他类型的重启也随另一个系统开始,详情请参阅操作手册 - 带 FlexPendant 的 IRC5
ctrl.bin:本文件主要包含: •机器人识别数据 •校准数据 • SIS 数据 •负荷计时器数据 文件存储于机器人出厂时的 SMB 板上。然后数据被传送至控制器,详细请 参阅操作手册 - 带 FlexPendant 的 IRC5。 注意,ctrl.bin 文件不会存储在硬盘/闪盘中的特定系统文件夹中。 这意 味着,即使更新或以任何其他方式替换系统软件,仍将保留文件中的所有数 据。
SMB 电路板:SMB 板(串行测量电路板)通常安装于机械单元上,主要包括来自 ctrl.bin 文件的数据。有关如何处理 SMB 电路板上的数据、在 SMB 与控制 器之间移动数据的详细信息,请参阅操作手册 - 带 FlexPendant 的 IRC5。
控制器海量存 储单位:控制模块主要海量存储单元位于计算机单元。 取决于控制器版本,存储单 元可能是硬盘驱动或闪盘驱动,而且大小也不同。 它也包含操作机器人的 所有必要软件,同时 RobotWare 也安装于此。 启动时,数据从海量存储器加载入 RAM 内存中。 电源关闭时, image.bin 文件自动保存于此。
RAPID 代码:本节包含所有可执行 RAPID 代码,这些代码是由 ABB 或客户编写的。
配置数据:该数据是配置文件的基本内容: • proc.cfg • moc.cfg • sio.cfg • mmc.cfg • sys.cfg 每个文件包含系统、选项等创建和定义时的设置。 配置文件创建后不能更改,但可以查阅其内容,详情请参阅操作员手册 – 故障排除。 更改配置文件内容时,ABB 强烈建议使用工具 RobotStudio 降 低产生错误的风险。 请参阅操作员手册 - RobotStudio。
文本:系统在操作过程中使用的一些文本在创建系统时选定了所有语言。
事件日志:记录于所有事件日志中的所有事件 这意味着,即使出现电源故障日志仍将被保存,这样即可快速找出导致电源 故障的起因。
内部状态:这些数据记录所有机器人轴的状态和位置、所有 I/O 以及与 MultiMove 系 统相连接的每一操纵器状态等。 这些数据在操作过程中持续更新。 如果系统由于任何原因(电源故障或机 器人与障碍物碰撞等)停止,这能够使系统不断返回至先前状态。
校准数据:这是一个机器人的校准数据,即,所有数据只描述一个机器人全部六个轴的 校准位置。
SIS:这是与 SIS 系统(Service Information System)相关的服务数据。 这意味着,即使控制器被替换,SIS 数据仍将被机器人保留。
负荷计时器数 据:这是负荷计时器数据。 这意味着,即使控制器被替换,负荷计时器计数仍将被机器人保留。
"系统":这是 RobotWare 安装后存储的目录。 映像文件存储于“Internal”目录。 注意,ctrl.bin 文件未存储于此,这也就是说即使在操作过程中更新系统 软件 image.bin 文件仍将被保留。
更多资讯:ABB机器人
