

所需设备:
高架起重机 :起重能力 1000kg(90° 时的最大负载)
环形吊索(2 件):• 起重能力/环形吊索:1000kg • 长度:2m、1.5m
吊升:按下图所示连接圆形吊带。
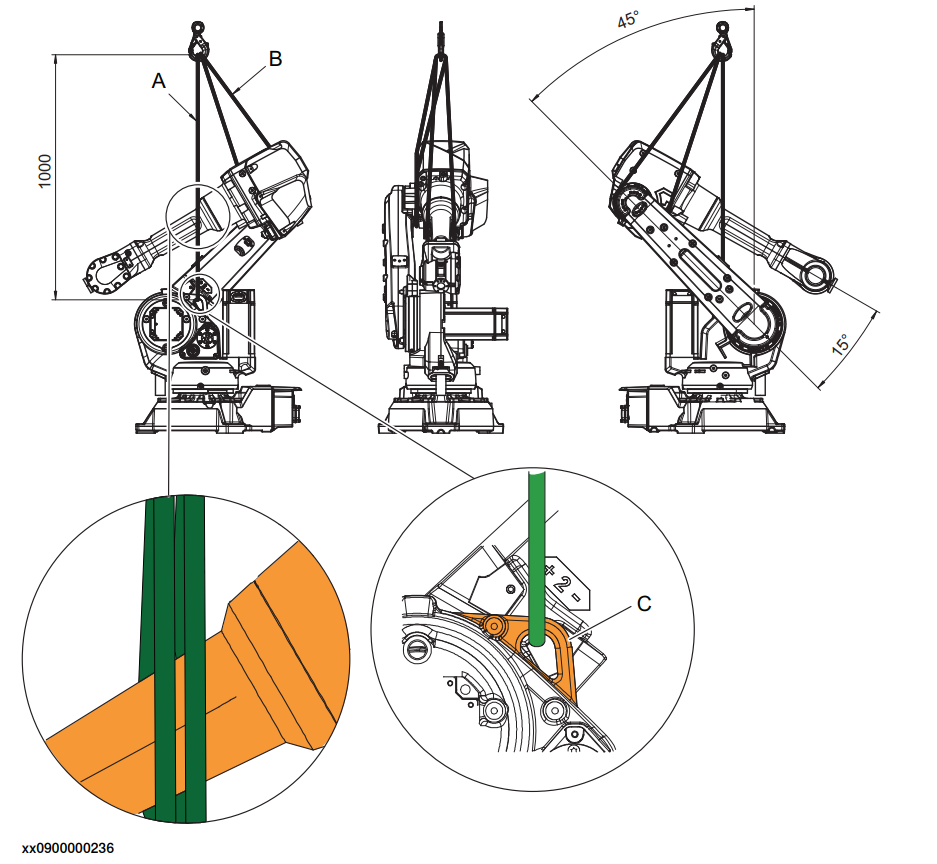
A 环形吊索,长 2m(绕上臂折成 U 形) 、B 环形吊索,长 1.5m(绕轴 3 齿轮箱折成 U 形) 、C 吊耳
吊升说明:
IRB 2600/IRB 2600 ID 机器人重量为 280 kg。 必须使用相应尺寸的吊装附件!
尝试在建议位置以外的任何位置吊升机器人可能 会导致机器人翻倒并造成严重的损坏或伤害!
在任何情况下,人员均不得出现在悬挂负载的下 方!
将机器人移到其最稳定的位置。 适用于机型 IRB 2600ID:轴 4 的的最佳位置是 ±90°。
关闭所有连接到机器人的: • 电源 • 液压源 • 气压源 然后再进入机器人工作区域。
将环形吊索 A 安装到机架吊耳上,并在上臂的 任一侧折成 U 形。
通过绕齿轮箱折成 U 形,将环形吊索 B 安装在 轴 3 齿轮箱上。
确保圆形吊带不会摩擦任何锋利的边缘。
吊装机器人时,环形吊索将自行调整。
进行吊装时,机器人会稍微向后倾斜!注意不要 损坏机器人底座处的接线盒!
用高架起重机吊升机器人。
更多资讯:ABB机器人
