

ABB机器人的机械结构因机器人配备的轴1和轴2齿轮箱而异。有一些差异是可见的,如 表中所示。
识别齿轮箱-机械结构 IRB 2600-20/1.65, IRB 2600-12/1.65, IRB 2600-12/1.85, IRB 2600ID-15/1.85, IRB 2600ID-8/2.0
识别齿轮箱-机械结构 IRB 2600-20/1.65 typeC,IRB2600-12/1.65 type C
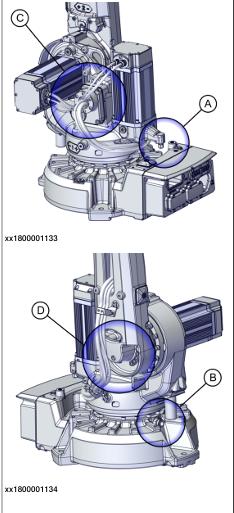
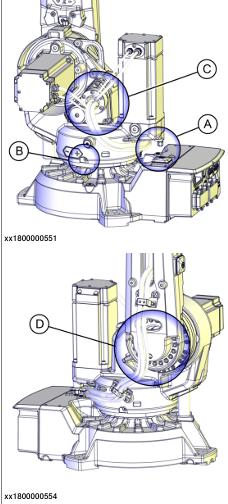
A Axis Calibration 的固定校准销位于电机法 兰的正下方。 校准工具衬套位于底座中心。Axis Calibration 的固定校准销位于电机法 兰的铸造手臂上。 校准工具衬套位于底座右侧。
B 排油塞位于齿轮箱左侧,且可通过机架中的 开口查看(当机器人处于同步位置时)。 排油塞位于齿轮箱前部(当机器人处于同步 位置时)。
C 电缆盖的形状为三角形。 电缆盖的形状为长方形。
D 将下臂固定到齿轮箱的17颗螺钉的孔型。 将下臂固定到齿轮箱的16颗螺钉的孔型。
根据货号识别齿轮箱 仅IRB2600-20/1.65 和 IRB 2600-12/1.65 机型受不同齿轮箱供应商影响。 使用该表和货号识别机器人上安装的齿轮箱版本。
更多资讯:ABB机器人
